ManRiX
|
| Home | | Back | |
Contributers |
ManRiX
Microkernel Services : |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ManRiX's Microkernel Architecture |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ManRiX is a microkernel based operating system. Microkernel contents the few essential servicea of kernel. Those components which are not required inside kernel are implemented as user servers . The ManRix microkernel performs the following tasks: •
Thread Management. OS
Initialization: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Thread and Process Management: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Processes
and Threads are the two basic concepts of program. In ManRiX microkernel,
threads are the fundamental units of execution. Processes are inactive
entity. Process just encapsulates the threads and address space.
Threads are scheduled independently no matter to which process they
belong. Each thread has two set of Stack one for running in Kernel
Mode called Kernel Stack and for User stack for user mode. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Interprocess Communication: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Inter
Process Communication is Heart of any Microkernel Based System.
In ManRiX Microkernel, Message passing is used as the IPC. We are
using Synchronous message passing. The message is sent directly
sent to another thread using tid. There are basically three types
of Messages in ManRiX. We have basically three types of Messages.
They are SHORT, LONG and MAP. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Signal Management: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Where, First row denotes Symbolic Name for signal. Second row shows the default action to take on signal receipt.
I = ignore 1.Signal_action:This system call defines action to take on receipt of a signal. The parameters are •
signal number This
system call is used to service following POSIX calls.
This
system call is used to service following POSIX calls. This
system call sends a signal to a particular thread or process. The
parameters are: SIG_REAL
/* for sigqueue */ This
system call is used to service following POSIX calls. signal_suspend : This
system call suspends the thread until any signal is delivered. The
parameters are: This
system call is used to service following POSIX calls. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Timer Management: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Timer notifies a thread when the time as measured by a particular clock has reached or passed a specified value, or when a specified amount of time has passed ManRiX support limited POSIX timers. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Schedular: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ManRiX supports
POSIX style scheduler. There are three scheduling policies, SCHED_FIFO
(First in-first out (FIFO) scheduling policy), SCHED_RR (Round
robin scheduling policy) and SCHED_OTHER (Another scheduling policy).
SCHED_FIFO and SCHED_RR are used for real time threads and SCHED_OTHER
is used for time sharing threads. The system threads use SCHED_OTHER
but have a higher priority than normal threads. There are 128
priorities where numerically lower value means low priority and
vice versa. The SCHED_FIFO and SCHED_RR policies have priorities
ranging from 88 to 119. They have static priorities. The SCHED_OTHER
priorities range from 4 to 87. The range from 0 to 3 is for idle
threads. The system threads (i.e. file servers, consoles etc)
use the policy SCHED_OTHER and have priorities from 46 to 87.
The priorities for system threads are static. There are also special
threads which handle interrupts called interrupt threads. They
have the highest priority ranging from 120 to 127. The normal
threads have priorities. Since ManRiX supports SMP systems, the scheduler should be able to schedule threads in all existing processors. In ManRiX, each processor has its own run queue. Since the run queue is a per processor object, there is no need to lock the run queue. One of the special features of ManRiX is automatic balancing of CPU load. There is no need to migrate the thread from one processor to another. Each run queue contains a counter of total no of threads in running in that processor. There is a hint pointing to the run queue having least no of threads. Now, during enqueuing, a thread is enqueued to the run queue pointed by the hint. This hint is updated either by idle thread or the timer interrupt code on every 500ms on loaded systems.The below figure depics ManRiX's schedualr concepts.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Exception and IRQ Management: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ManRiX
does not handle devices in kernel space. They can be implemented
in user space using a set of interfaces. The ManRiX microkernel
sends appropriate signals to the corresponding threads on CPU exceptions. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Memory Management: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
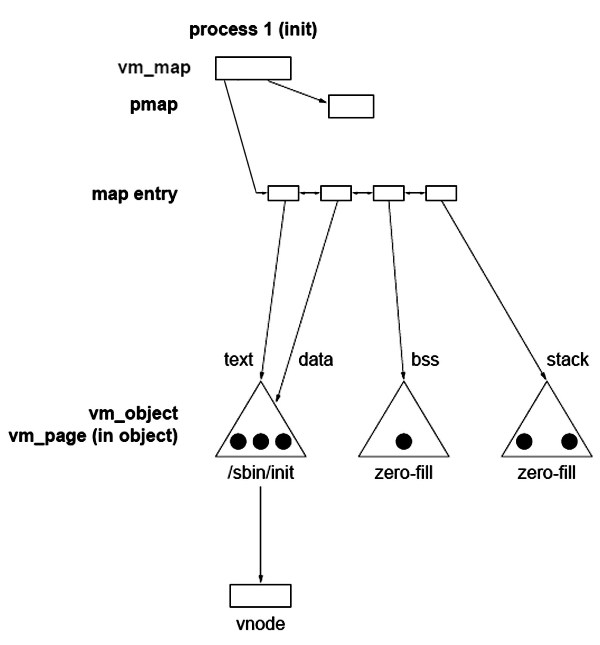
The ManRiX Memory Manager is based in Mach’s VM design. The VM manager is divided into two parts, the machine dependent part called that Pmap and the machine independent part called the vmmap. This technique makes the portability easier to new architectures. MACH’s original VM system was designed on an object oriented manner. Its basic abstractions are represented by objects that are accessed by a well defined interface. The highest level object is vm_map. A vmmap describes the virtual address space of a process or the kernel. It contains a list of valid mappings in the virtual address space and those mapping’s attributes. It holds a doubly linked list of vm_map_entries and a hint pointing to the last entry that resolved a page fault. Each vm_map_entry describes a contiguous region of virtual memory that has some protections. ManRiX Virtual Manager.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Kernel pre-emption | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ManRiX
microkernel is a fully preemptible. It means that it is able to preempt
the thread even if it is running in kernel mode. So, a highest priority
thread starts running as soon as it becomes eligible to run. The Kernel
preemption feature highly increases the responsiveness of the system
and decreases the latencies. So, due to this characteristic ManRiX
can also be used in real time systems.
Preemption can be disabled at critical section. The locks automatically disable kernel preemption and re enables them when lock is released. When the preemption is disabled, the interrupts are still enabled but the timer interrupt does not switch threads . |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Symmetric multiprocessor(SMP) | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ManRiX microkernel has a multiprocessor support. For now, it supports Intel Multi Processors (MP) systems only. The number of Processors supported till now is eight. In SMP systems, Kernel Synchronization is a major issue. We overcome this issue using spin locks. The specialty of ManRiX microkernel is that the Interrupts are always enabled except in few situations like Interrupt redirection code. So, Spin locks don’t disable interrupts and thus the system is highly responsive. In ManRiX the Kernel code path is very short because the lengthy file system and device handler does not exist in microkernel. So, the mutex locks are not used. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||